Drivetrain Commands
NOTE
Some of the content on the following pages was taken with permission from the FTCLib Drivebases page.
IMPORTANT
Currently, NextFTC only has support for mecanum, x-drive, and differential (tank) drivetrains. If you write a command for another, please share it with us!
NextFTC has commands to control different types of drivetrains. This page goes through the different options for controlling your drivetrain in TeleOp.
Holonomic Drivetrains
A holonomic drive is one that can move in omnidirectional space, which is why it is often called an omnidirectional drive. There are different subtypes of holonomic drivetrains. Currently, NextFTC only has support for mecanum drives and x-drives.
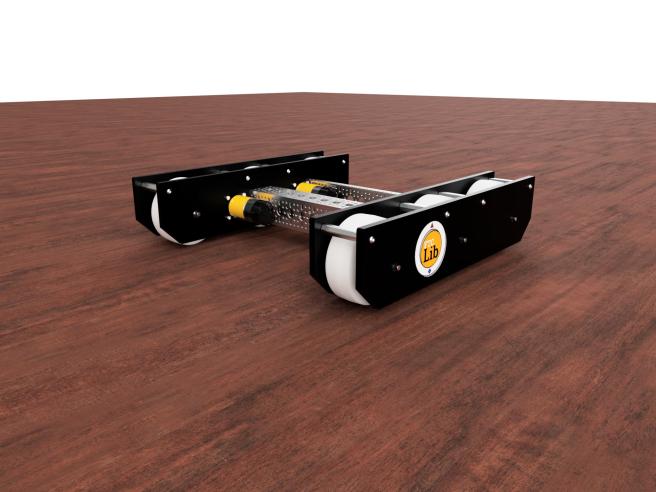
An X-drive is a holonomic base that has four omni wheels positioned into an "X" shape.
X-Drive
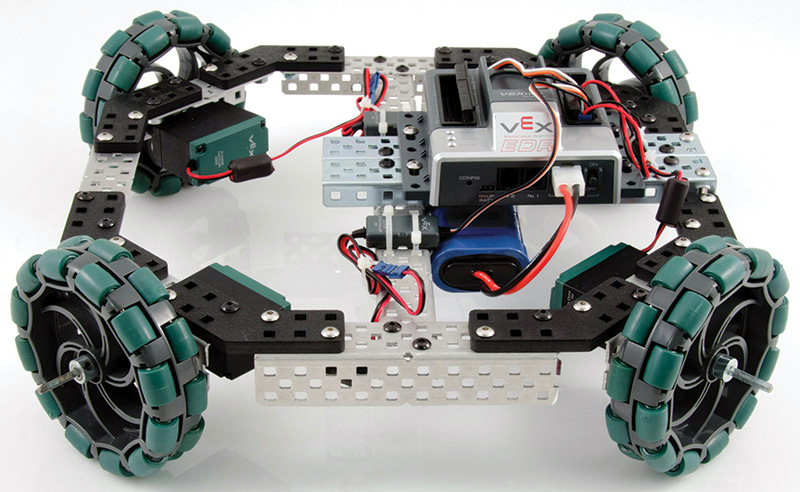
A mecanum drivetrain is a type of holonomic drive that utilizes mecanum wheels for movement.
Mecanum Drive

To control a holonomic drivetrain in TeleOp, see the holonomic drivetrain page.
Differential (Tank) Drivetrains
A differential drivetrain is one that has two motors or motor groups on either side of the robot. Each side acts as a connected set or motor group.
Differential Drive
To control a differential drivetrain in TeleOp, see the differential drivetrain page.